Install MegaPirateNG on your flight-controller
If you just want to install MegaPirateNG on your flight-controller we recommend our FlashTool, which is supported on Windows and MacOSX.
If you want to compile it yourself or have special configuration needs that are not possible with the FlashTool, follow this page.
How to compile MegaPirateNG from source
Prerequisites
-
ArduPilot-Arduino 1.0.3
You need a special version of the Arduino software to compile the source.
-
The latest sourcecode
If you know your way around GIT you also can clone the respective repository from github.com
Prepare your Environment
-
Extract ArduPilot-Arduino 1.0.3, for example to
c:\quadcopterMake sure that the full pathname is not longer than
255chars, or you could encounter compile problems.You now should have a directory called
ArduPilot-Arduino-1.0.3-windows(Windows) or anArduinoapplication (MacOSX) in thec:\quadcopterdirectory. -
Extract the downloaded source code, for example to
c:\quadcopterYou now should have a new directory in the
c:\quadcopterdirectory called like the zip file. In our example we use the nameardupilot-mpngfor this directory. -
Important Replace the shipped
pde.jarfrom the source directory to the ardupilot-arduino software.Windows:
Locate the
pde.jarin your sources root directory for examplec:\quadcopter\ardupilot-mpng\pde.jar, copy and replace the file with the file inc:\quadcopter\ArduPilot-Arduino-1.0.3-windows\libMacOSX:
Locate the
pde.jarin your sources root directory for example~username/quadcopter/ardupilot-mpng/pde.jar, copy and replace the file with the file in~username/quadcopter/Arduino.app/Contents/Resources/Java -
Start ArduPilot-Arduino
-
Change the target-platform to MegaPirateNG
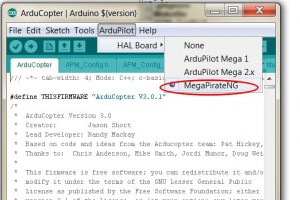
-
Open preferences and set the sketch folder to the source code directory, for example
c:\quadcopter\ardupilot-mpng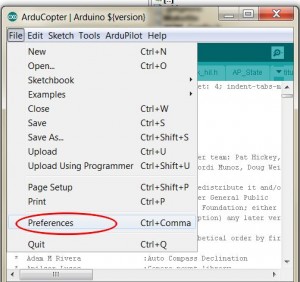
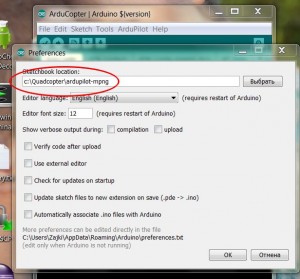
You also should uncheck the “Update sketch files to new extension on save” checkbox.
-
Connect your Flight Controller to your Computer and set the Serial Port in the Arduino IDE
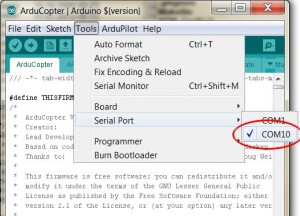
-
Important Restart the Arduino IDE
Compiling
Now open your desired APM Autopilot Platform (ArduCopter, ArduPlane…) via File > Sketchbook.
To compile the source code, pressing either the first icon in the toolbar or press ctrl+R.
If your source compiles without a problem you are ready to begin to configure your UAV.